Iterative policy evaluation on FrozenLake-v0 (Python)
In this example, we use the iterative policy iteration algorithm to train an
agent on the FrozenLake-v0 environment. In PyCubeAI there is a
tabular implementation of the algorithm implemented in the IterativePolicyEvaluator class.
Imports needed to run the example.
import gym
import numpy as np
import matplotlib.pyplot as plt
from src.algorithms.dp.iterative_policy_evaluation import IterativePolicyEvaluator, DPAlgoConfig
from src.policies.uniform_policy import UniformPolicy
from src.algorithms.rl_serial_agent_trainer import RLSerialTrainerConfig, RLSerialAgentTrainer
from src.worlds.world_helpers import n_states, n_actions
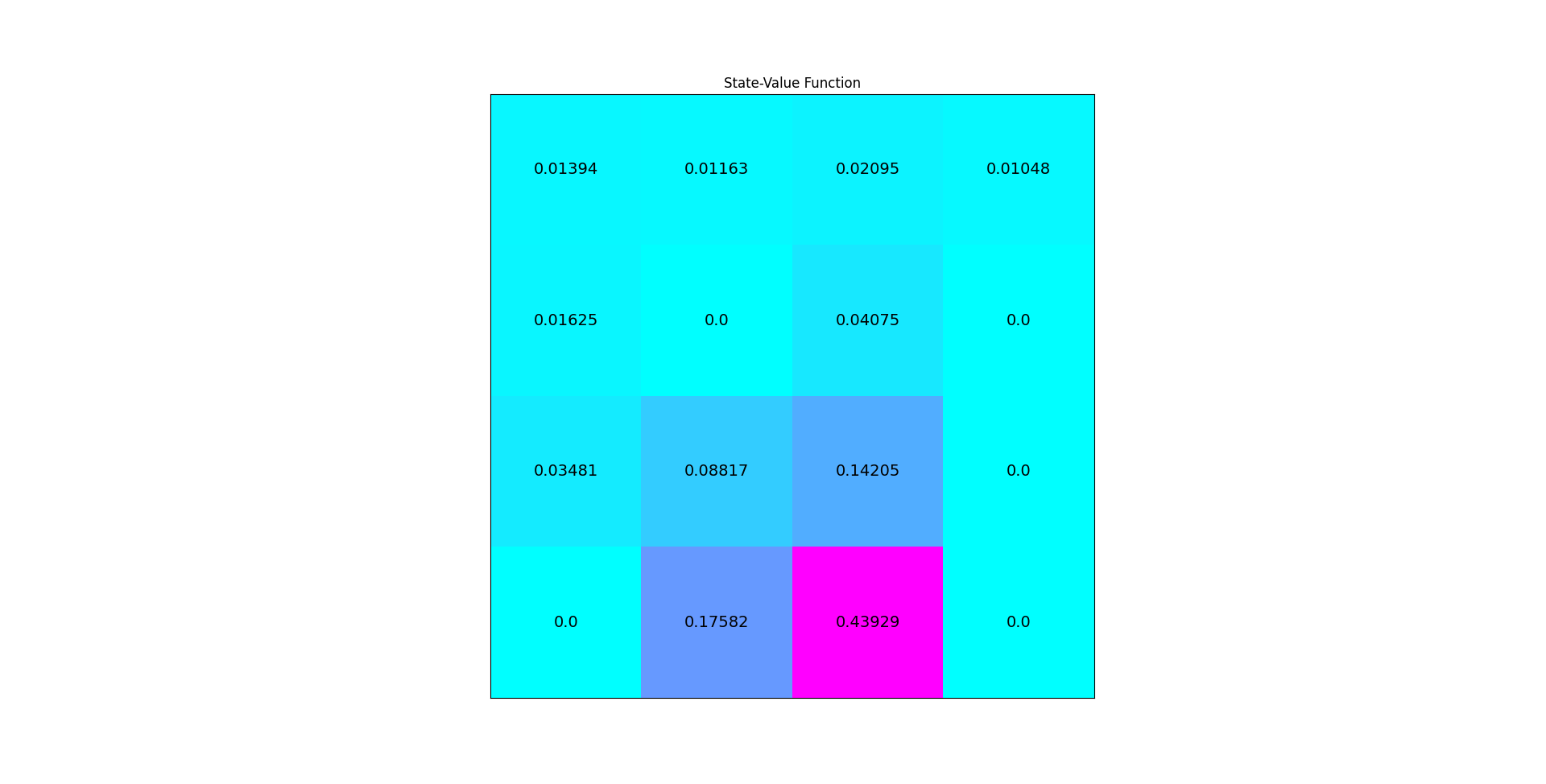
Next we implement a helper function for plotting the value function
def plot_values(v: np.array) -> None:
# reshape value function
V_sq = np.reshape(v, (4, 4))
# plot the state-value function
fig = plt.figure(figsize=(6, 6))
ax = fig.add_subplot(111)
im = ax.imshow(V_sq, cmap='cool')
for (j, i), label in np.ndenumerate(V_sq):
ax.text(i, j, np.round(label, 5), ha='center', va='center', fontsize=14)
plt.tick_params(bottom=False, left=False, labelbottom=False, labelleft=False)
plt.title('State-Value Function')
plt.show()
Finally, we put everything together. The driver starts with a UniformPolicy instance which
we initalize with the number of states and actions of the environment.
if __name__ == '__main__':
env = gym.make("FrozenLake-v0")
policy_init = UniformPolicy(n_actions=n_actions(env), n_states=n_states(env))
agent_config = DPAlgoConfig()
agent_config.gamma = 1.0
agent_config.tolerance = 1.0e-8
agent_config.policy = policy_init
agent = IterativePolicyEvaluator(agent_config)
config = RLSerialTrainerConfig()
config.n_episodes = 100
trainer = RLSerialAgentTrainer(agent=agent, config=config)
ctrl_res = trainer.train(env)
print(f"Converged {ctrl_res.converged}")
print(f"Number of iterations {ctrl_res.n_itrs}")
print(f"Residual {ctrl_res.residual}")
plot_values(agent.v)
Running the driver code above produces the following output
INFO: Episode 0 of 100, (1.0% done)
INFO: Episode 10 of 100, (11.0% done)
INFO: Episode 20 of 100, (21.0% done)
INFO: Episode 30 of 100, (31.0% done)
INFO: Episode 40 of 100, (41.0% done)
INFO: Episode 50 of 100, (51.0% done)
INFO: On Episode 56 the break training flag was set. Stop training
INFO Done. Execution time 0.013857874000677839 secs
Converged True
Number of iterations 57
Residual 1e-10
The image below shown the value function produced