Iterative policy evaluation on FrozenLake-v0 (C++)
In this example, we use the iterative policy iteration algorithm to train an
agent on the FrozenLake-v0 environment. In CubeAI there is a
tabular implementation of the algorithm implemented in the IterativePolicyEvaluator class.
Code
#include "cubeai/base/cubeai_config.h"
#ifdef USE_GYMFCPP
#include "cubeai/base/cubeai_types.h"
#include "cubeai/rl/algorithms/dp/iterative_policy_evaluation.h"
#include "cubeai/rl/trainers/rl_serial_agent_trainer.h"
#include "cubeai/rl/policies/uniform_discrete_policy.h"
#include "gymfcpp/gymfcpp_types.h"
#include "gymfcpp/frozen_lake_env.h"
#include "gymfcpp/time_step.h"
#include <boost/python.hpp>
#include <iostream>
namespace rl_example_6
{
using cubeai::real_t;
using cubeai::uint_t;
using cubeai::rl::policies::UniformDiscretePolicy;
using cubeai::rl::algos::dp::IterativePolicyEval;
using cubeai::rl::algos::dp::IterativePolicyEvalConfig;
using cubeai::rl::RLSerialAgentTrainer;
using cubeai::rl::RLSerialTrainerConfig;
typedef gymfcpp::TimeStep<uint_t> time_step_t;
}
int main() {
using namespace rl_example_6;
Py_Initialize();
auto gym_module = boost::python::import("__main__");
auto gym_namespace = gym_module.attr("__dict__");
gymfcpp::FrozenLake<4> env("v0", gym_namespace);
env.make();
UniformDiscretePolicy policy(env.n_states(), env.n_actions());
IterativePolicyEvalConfig config;
config.tolerance = 1.0e-8;
IterativePolicyEval<gymfcpp::FrozenLake<4>, UniformDiscretePolicy> algorithm(config, policy);
RLSerialTrainerConfig trainer_config = {10, 10000, 1.0e-8};
RLSerialAgentTrainer<gymfcpp::FrozenLake<4>, IterativePolicyEval<gymfcpp::FrozenLake<4>,
UniformDiscretePolicy>> trainer(trainer_config, algorithm);
auto info = trainer.train(env);
std::cout<<info<<std::endl;
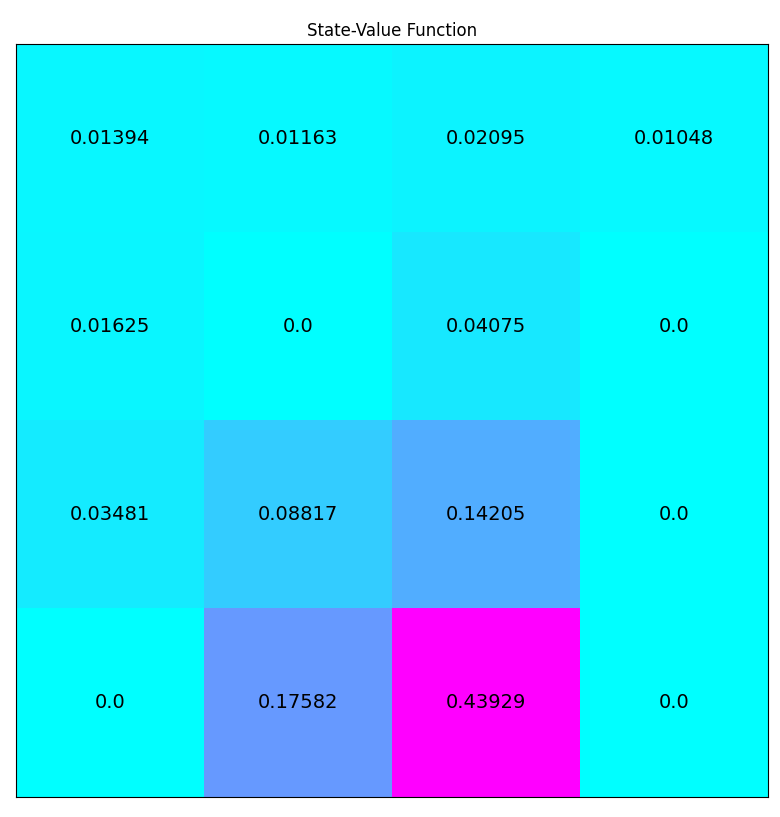
// save the value function for plotting
algorithm.save("iterative_policy_evaluation_frozen_lake.csv");
return 0;
}
#else
#include <iostream>
int main() {
std::cout<<"This example requires gymfcpp. Configure cubeai to use gymfcpp"<<std::endl;
return 0;
}
#endif
Results
Episode index........: 0
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.0023441
Has extra............: false
Episode index........: 10
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.00178728
Has extra............: false
Episode index........: 20
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.00174855
Has extra............: false
Episode index........: 30
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.00167018
Has extra............: false
Episode index........: 40
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.001637
Has extra............: false
Episode index........: 50
Episode iterations...: 16
Episode reward.......: 3
Episode time.........: 0.00200397
Has extra............: false
INFO: Stopping training at index=56
Converged...: false
Tolerance...: 1e-08
Residual....: 1.79769e+308
Iterations..: 57
Total time..: 0.103961