Simple Q-learning based controller for epuck robot
In this example, we try to train a Q-learning based agent that controls a robot so that it moves on a straight line. Specifically, we simulate the epuck robot from the Webots library. The world is a simple rectangular grid shown in the image below
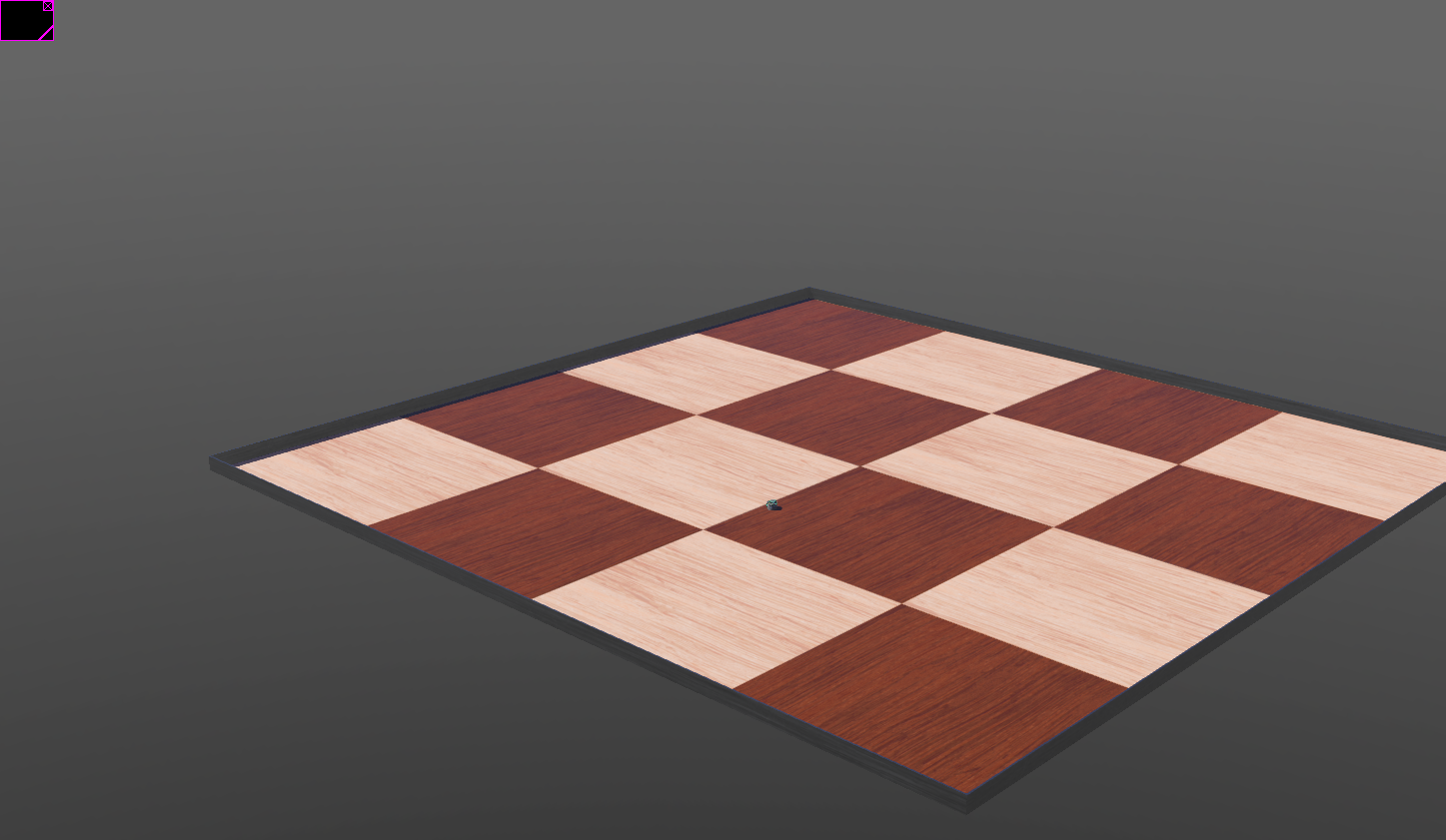
There are two actions available, MOVE_FWD and STOP. The agent begins at position (0, 0, 0) which is the
center of the grid. The goal is to move the robot at [-2.5, 0.0] and stop there.
The controller, we will develop in this example, is very simple. Ideally, we would like to monitor some aspect of the robot e.g. the speed input to the motors. However, the controller in this example will simply select actions to be executed. The result of this, is that our robot may drift during the simulation. However, since the action space is really small and we limit the mumber of simulation episodes to a small number, this drift will not be be signigicant. We will address these points in a later example.
Recall, that the vanilla Q-learning algorithm, uses a table tp represent the state-action value function.
Thus, we will digitize the grid environment using ten points in every direction. This is done in the
EnvironmentWrapper class.
Let’s go over the code. As usual, we start with the needed imports
import numpy as np
from pathlib import Path
import matplotlib.pyplot as plt
from controller import Supervisor, Node
from src.worlds.webot_environment_wrapper import EnvironmentWrapper, EnvConfig
from src.worlds.state_aggregation_webot_env import StateAggregationWebotEnv, StateAggregationWebotEnvBoundaries
from src.worlds.webot_robot_action_space import WebotRobotActionType, WebotRobotActionBase, \
WebotRobotMoveFWDAction, WebotRobotStopAction
from src.agents.diff_drive_robot_qlearner import DiffDriveRobotQLearner
from src.algorithms.td.td_algorithm_base import TDAlgoInput
from src.policies import EpsilonGreedyPolicy, EpsilonDecayOption
from src.utils import INFO
Next we define constants that control the program execution
# Define a variable that defines the duration of each physics step.
# This macro will be used as argument to the Robot::step function,
# and it will also be used to enable the devices.
# This duration is specified in milliseconds and it must
# be a multiple of the value in the basicTimeStep field of the WorldInfo node.
TIME_STEP = 32
MAX_SPEED = 6.28
MIN_SPEED = 0.0
# threshold value for the proximity sensors
# to identify the fact that the robot crushed the wall
BUMP_THESHOLD = 90
N_EPISODES = 1000
PLOT_STEP = 10
N_ITRS_PER_EPISODE = 2000
EPS = 1.0
EPS_DECAY_OP = EpsilonDecayOption.INVERSE_STEP
ALPHA = 0.1
GAMMA = 0.99
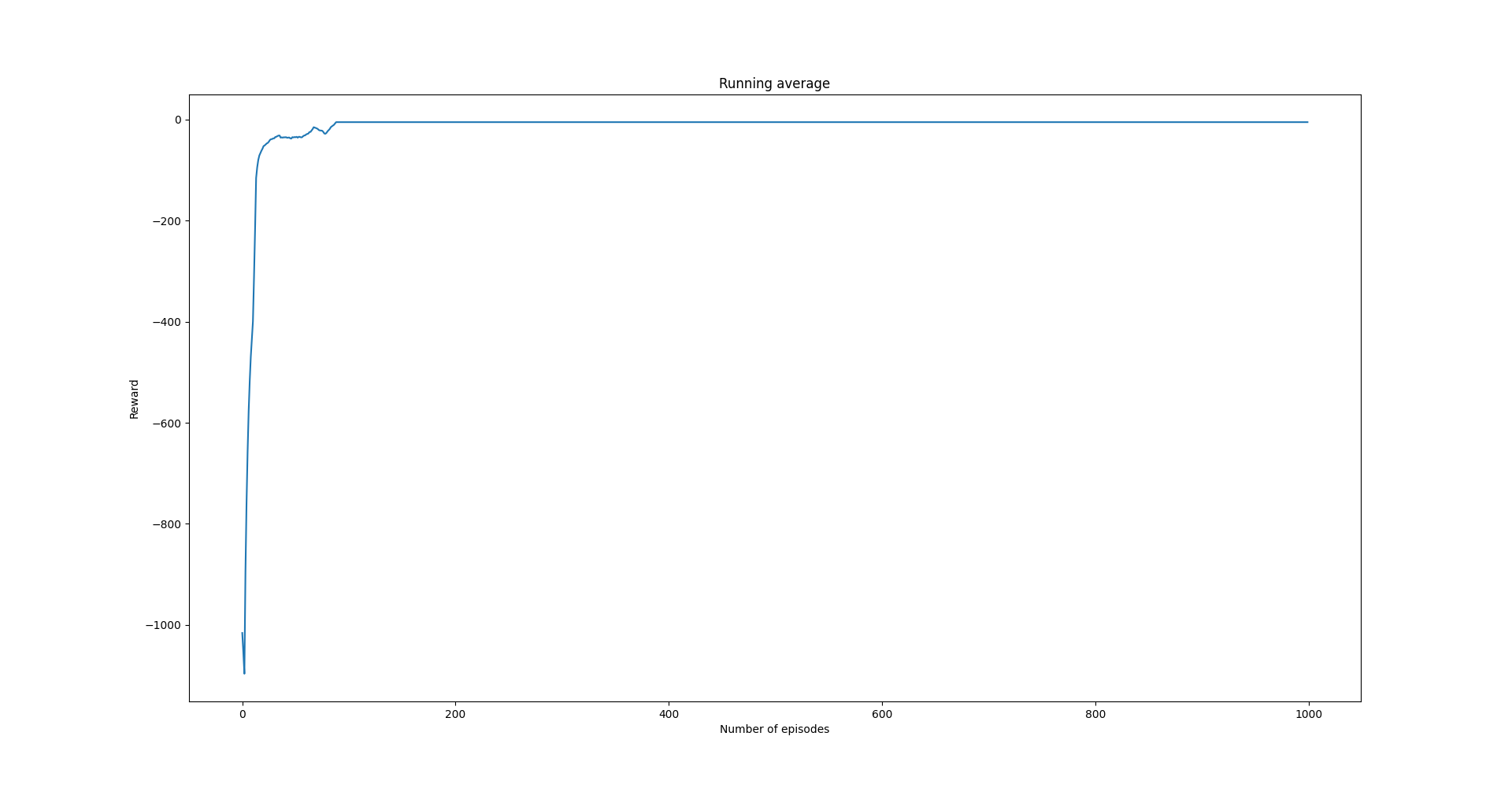
Next, we define a function that allows us to plot a running mean of the gained rewards
def plot_running_avg(avg_rewards, step):
running_avg = np.empty(avg_rewards.shape[0])
for t in range(avg_rewards.shape[0]):
running_avg[t] = np.mean(avg_rewards[max(0, t - step): (t + 1)])
plt.plot(running_avg)
plt.xlabel("Number of episodes")
plt.ylabel("Reward")
plt.title("Running average")
plt.show()
The Policy class represents a simple policy strategy we will follow. Observe, that when at
state (5, 5) i.e. the center of the grid, we always select MOVE_FWD action
class Policy(EpsilonGreedyPolicy):
def __init__(self, n_actions: int) -> None:
super(Policy, self).__init__(eps=EPS, decay_op=EPS_DECAY_OP, n_actions=n_actions)
def __call__(self, q_func, state) -> int:
# if we are at the origin always choose FWD
if state == (5, 5):
return 1
return super(Policy, self).__call__(q_func, state)
def select_action(self, q_func, state) -> int:
# if we are at the origin always choose FWD
if state == (5, 5):
return 1
return super(Policy, self).max_action(q_func, state=state, n_actions=self.n_actions)
The OnGoal class deals with rewards assignement. It checks whether the robot reached the goal position
and which action has been chosen.
class OnGoal(object):
def __init__(self, goal_position: list) -> None:
# radius away from the goal
self.goal_radius: float = 0.1
self.robot_radius = 7.4 / 100.0
self.goal_position = np.array(goal_position)
self.start_position = np.array([0., 0., 0., ])
def check(self, robot_node: Node, action: WebotRobotActionBase) -> tuple:
position = robot_node.getPosition()
position = np.array(position)
# compute l2 norm from goal
l2_norm = np.linalg.norm(position - self.start_position)
# we don't want to be stacked where we started
# we want to make progress. If we are at the
# start position and decide to STOP then exit the game
if l2_norm < 1.0e-4 and action.action_type == WebotRobotActionType.STOP:
return True, -2.0, l2_norm
# compute l2 norm from goal
l2_norm = np.linalg.norm(position - self.goal_position)
if l2_norm < self.goal_radius:
# we reached the goal but we also want
# the robot to stop
if action.action_type == WebotRobotActionType.STOP:
return True, 10.0, l2_norm
else:
# otherwise punish the agent
return False, -2.0, l2_norm
# goal has not been reached. No reason to stop
# so penalize this choice
if action.action_type == WebotRobotActionType.STOP:
return False, -2.0, l2_norm
return False, 0.0, l2_norm
Finally, the controller_main function puts everything together. We need a Supervisor Webot Node so that
we can reset the environment. We obtain the robot node using the supervisor.getFromDef(name='qlearn_e_puck') function.
def controller_main():
# number of steps to play
supervisor = Supervisor()
robot_node = supervisor.getFromDef(name='qlearn_e_puck')
if robot_node is None:
raise ValueError("Robot node is None")
robot_node.enablePoseTracking(TIME_STEP)
goal_position = [0.0, 0.0, -2.5]
on_goal_criterion = OnGoal(goal_position=goal_position)
robot = supervisor
env_config = EnvConfig()
env_config.dt = TIME_STEP
env_config.robot_name = "qlearn_e_puck"
env_config.bump_threshold = BUMP_THESHOLD
env_config.on_goal_criterion = on_goal_criterion
env_config.reward_on_wall_crush = -5.0
environment = EnvironmentWrapper(robot=robot, robot_node=robot_node, config=env_config)
environment.add_action(action=WebotRobotStopAction())
environment.add_action(action=WebotRobotMoveFWDAction(motor_speed=MAX_SPEED))
# position aggregation environment
boundaries = StateAggregationWebotEnvBoundaries(xcoords=(-3.0, 3.0),
ycoords=(-3.0, 3.0))
state_aggregation_env = StateAggregationWebotEnv(env=environment,
boundaries=boundaries, states=(10, 10))
agent_config = TDAlgoInput()
agent_config.n_episodes = N_EPISODES
agent_config.n_itrs_per_episode = N_ITRS_PER_EPISODE
agent_config.gamma = GAMMA
agent_config.alpha = ALPHA
agent_config.output_freq = 1
agent_config.train_env = state_aggregation_env
agent_config.policy = Policy(n_actions=state_aggregation_env.n_actions)
agent = DiffDriveRobotQLearner(algo_in=agent_config)
agent.train()
agent.save_q_function(filename=Path("q_learner.json"))
plot_running_avg(agent.total_rewards, step=PLOT_STEP)
print("{0} Finished training".format(INFO))
# once the agent is trained let's play
agent.training_finished = True
agent.load_q_function(filename=Path("q_learner.json"))
agent.play(env=state_aggregation_env, n_games=1)
if __name__ == '__main__':
controller_main()
In order to run this example, we will need to launch the environment on Webots. Running the driver code above produces the following running average rewards