SARSA algorithm on CartPole-v0 (Python)
Overview
SARSA algorithm on CartPole-v0 environment. Since the environment has a continuous state vector we perform state aggregation
Code
import matplotlib.pyplot as plt
import numpy as np
from src.algorithms.td.td_algorithm_base import TDAlgoConfig
from src.algorithms.td.sarsa import Sarsa
from src.worlds.state_aggregation_cart_pole_env import StateAggregationCartPoleEnv
from src.policies.epsilon_greedy_policy import EpsilonGreedyPolicy, EpsilonDecayOption
from src.trainers.rl_serial_algorithm_trainer import RLSerialTrainerConfig, RLSerialAgentTrainer
Env = TypeVar('Env')
def plot_running_avg(avg_rewards):
running_avg = np.empty(avg_rewards.shape[0])
for t in range(avg_rewards.shape[0]):
running_avg[t] = np.mean(avg_rewards[max(0, t-100) : (t+1)])
plt.plot(running_avg)
plt.xlabel("Number of episodes")
plt.ylabel("Average")
plt.title("Running average")
plt.show()
class CartPoleV0SARSA(Sarsa):
def __init__(self, config: TDAlgoConfig):
super(CartPoleV0SARSA, self).__init__(algo_config=config)
def actions_before_training_begins(self, env: Env, **options) -> None:
super(CartPoleV0SARSA, self).actions_before_training_begins(env, **options)
# initialize properly the state
for state in env.state_space:
for action in range(env.n_actions):
self.q_table[state, action] = 0.0
if __name__ == '__main__':
GAMMA = 1.0
ALPHA = 0.1
EPS = 1.0
env = StateAggregationCartPoleEnv(n_states=10) #, state_var_idx=4)
sarsa_config = TDAlgoConfig(gamma=GAMMA, alpha=ALPHA, policy=EpsilonGreedyPolicy(n_actions=env.n_actions, eps=EPS,
decay_op=EpsilonDecayOption.INVERSE_STEP,
min_eps=0.001),
n_episodes=50000, n_itrs_per_episode=500)
sarsa = CartPoleV0SARSA(config=sarsa_config)
rl_trainer_config = RLSerialTrainerConfig(n_episodes=50000, output_msg_frequency=100)
trainer = RLSerialAgentTrainer(algorithm=sarsa, config=rl_trainer_config)
trainer.train(env)
# plot average reward per episode
avg_reward = trainer.avg_rewards
plt.plot(trainer.rewards)
plt.xlabel("Episode")
plt.ylabel("Average reward")
plt.title("Average reward per episode")
plt.show()
plot_running_avg(avg_rewards=np.array(trainer.rewards))
Results
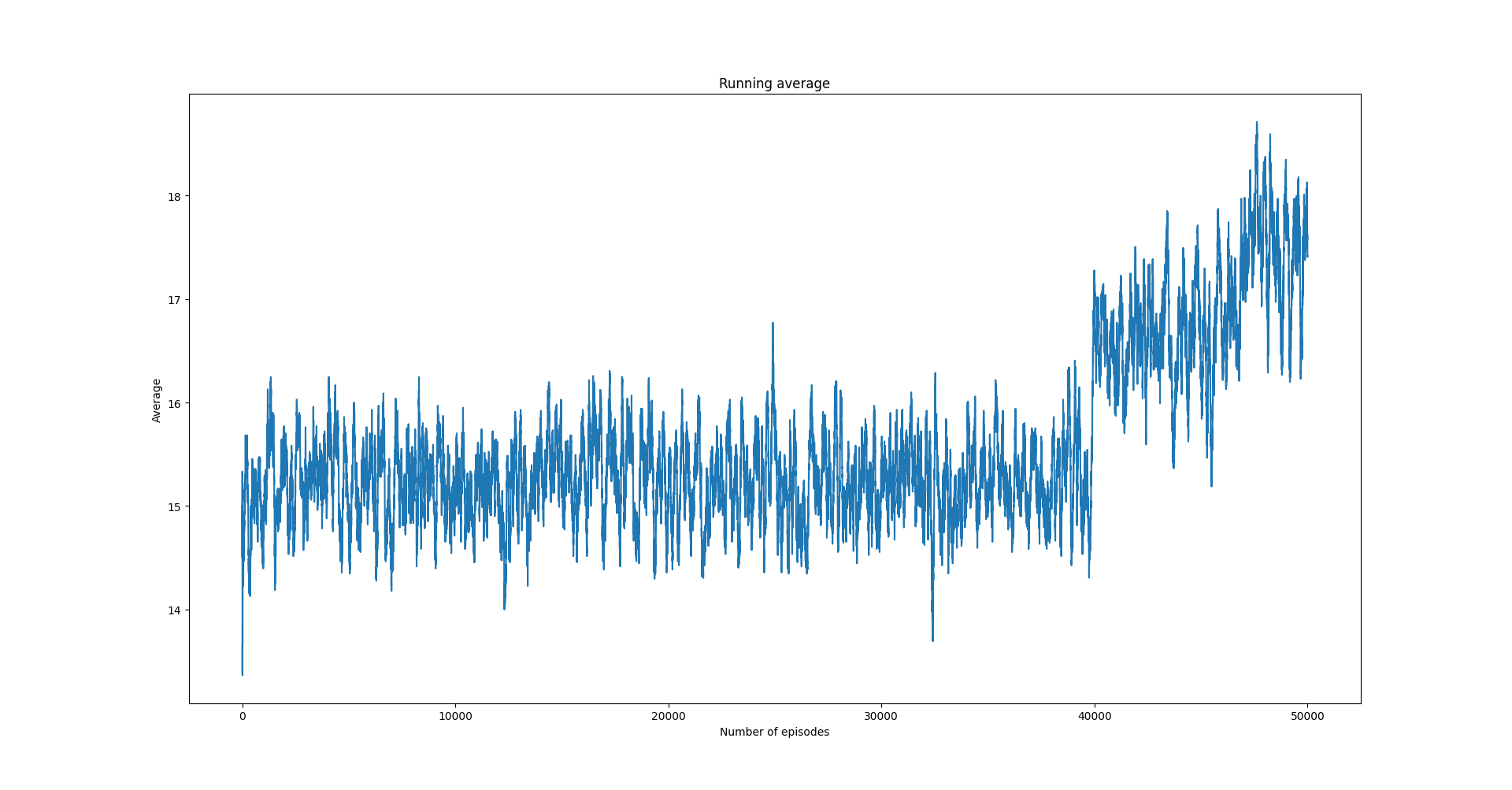
Running reward average.